离线部署SDK生成

模型部署完成后会出现下载SDK的按钮,点击按钮下载SDK并保存好SDK。
进入EasyDL官网的技术文档
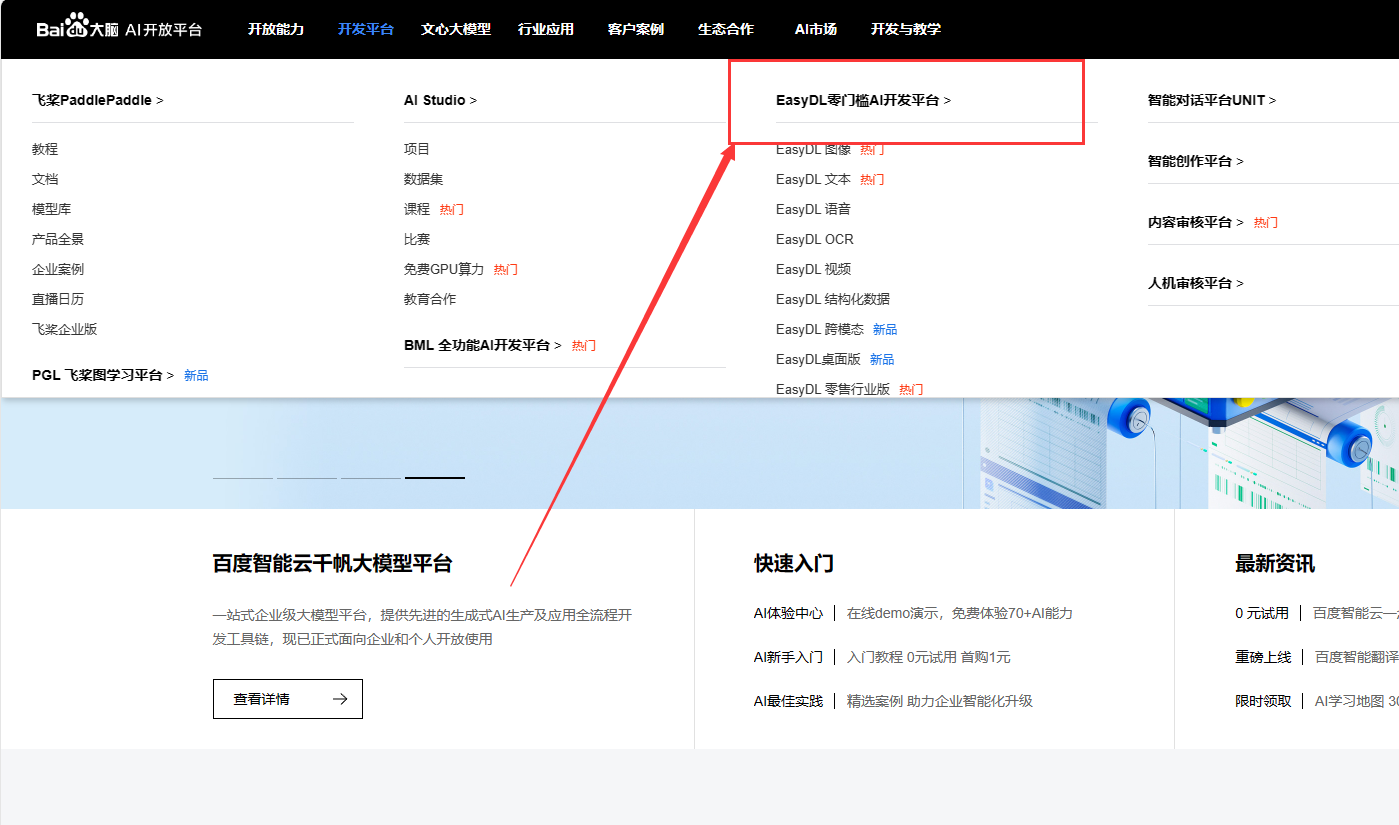

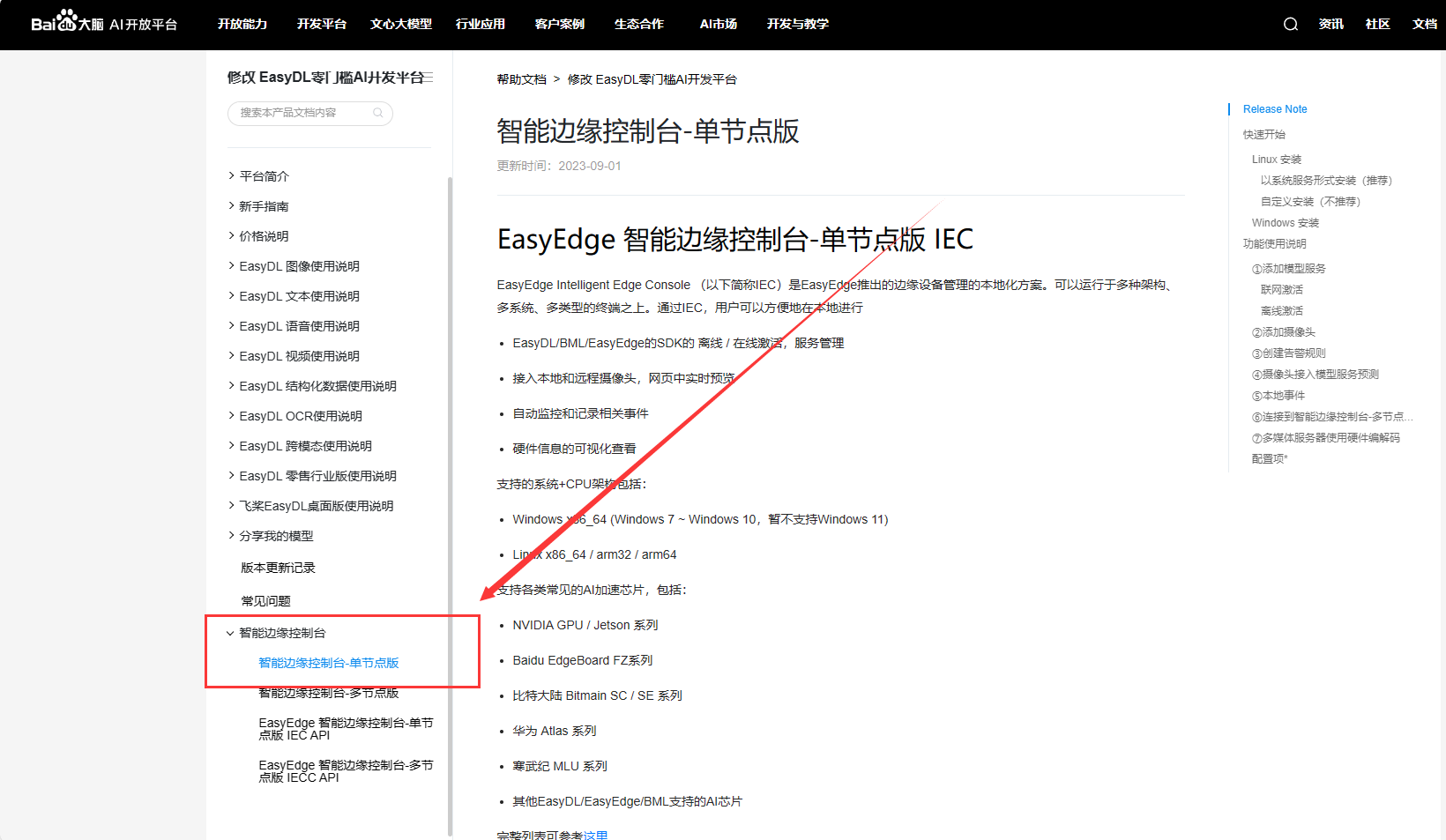
安装智能边缘控制台
跟着教程,完成安装:点此链接
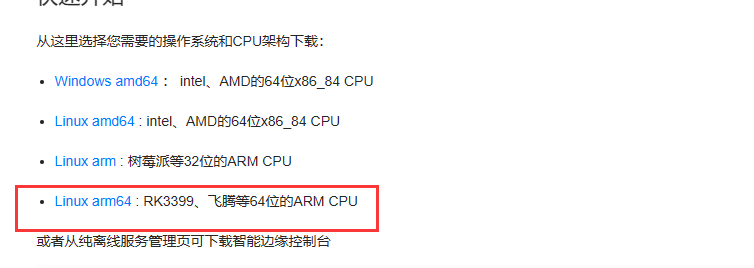
树莓派4b是Linux arm64的架构,点击对应的链接进行下载。
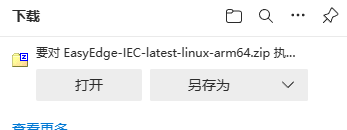
下载完成之后通过SecureFX软件将该压缩包传到树莓派并解压;解压完成后的目录结构如下所示:
├── easyedge-iec
├── easyedge-iec-setup.sh
├── etc
│ └── easyedge-iec.yml
└── readme.txt
解压完成后,通过终端进入该目录执行一下命令进行安装(前提是以root权限):
bash ./easyedge-iec-setup.sh install
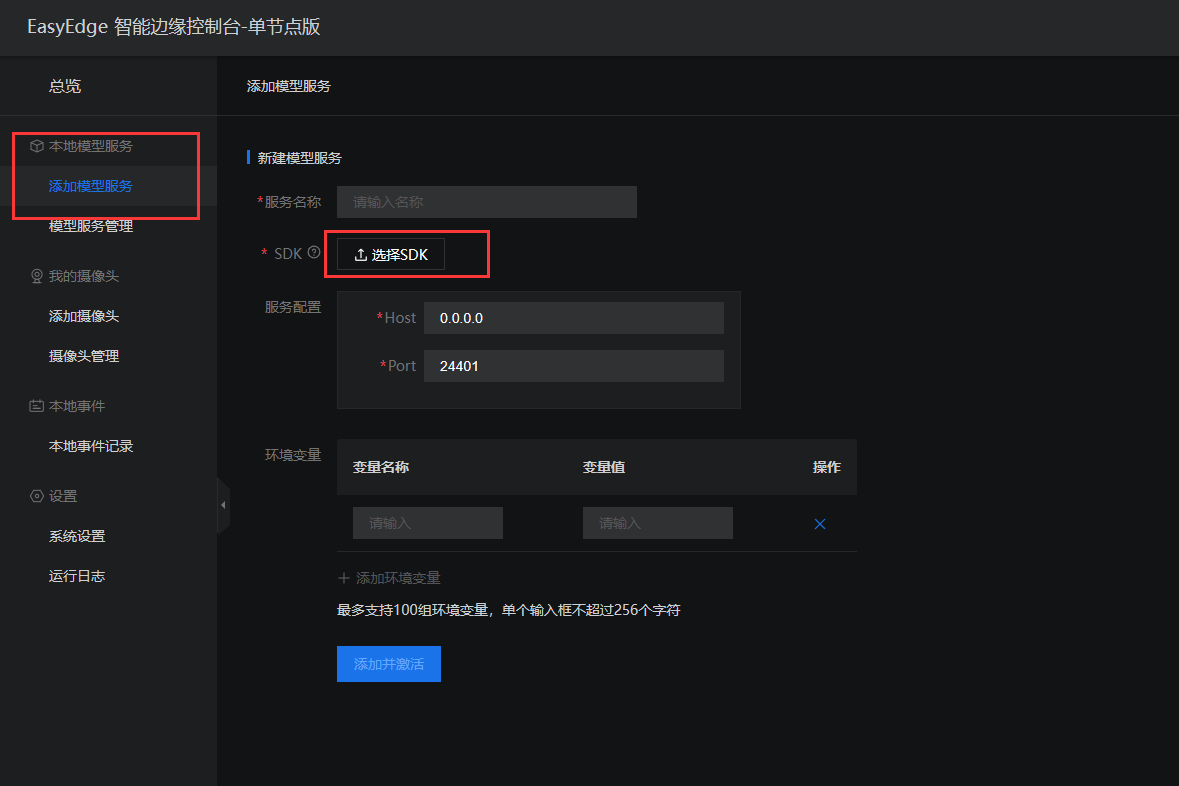
安装完成之后就可以通过工程师站的浏览器访问边缘控制台。

登录进入控制台,就可以用之前下载的SDK发布服务了。