首页
编程日记
ChatGpt专题
LINUX学习
Java学习
前端教程
单片机
lua 元表
抽象代数
终端
dirs
SylixOS
CVE-2017-15715
ssl
医学统计学
neo4j
aws
redis安装
GPT-3
保险
symfony
计算机软件考试
Dynamics365 CRM
python常见错误
均线策略
superset
常用方法
MATLAB算法实战应用案例精讲-【人工智能】边缘计算(补充篇)
news
/
2024/5/19 16:17:41
标签:
人工智能
,
边缘计算
目录
前言
算法原理
传统边缘检测算子
构建通用的边缘检测算子
图
http://www.niftyadmin.cn/n/5052762.html
相关文章
cJSON.c 在mfc中编译失败报 lnk2005错误
问题一、在MFC工程中导入cJson.c 编译时报以下错误: 严重性 代码 说明 项目 文件 行 禁止显示状态 错误 C1853 “x64\Release\xxx.pch”预编译头文件来自编译器的早期版本,或者预编译头为 C 而在 C 中使用它(或相反) xxx …
阅读更多...
如何实现服务器时间同步
为什么要做时间同步 在进行系统测试的时候,服务器时间同步很重要。例如web应用服务器与数据库服务器的时间同步,有一个定时任务,它的执行,如果服务器直接时间不通过,可能造成执行周期出现混乱。 ntp实现服务器时间同…
阅读更多...
4个独立通道或8非隔离ARINC825接口卡
首先,我们来看一下这个板卡的外观。该板卡采用标准的PCI Express x1接口,可以方便地插入到各种计算机插槽中。整个板卡体积小巧,长12cm,宽8cm,高1.5cm,轻便的设计使得携带和安装都非常方便。 接下来&#x…
阅读更多...
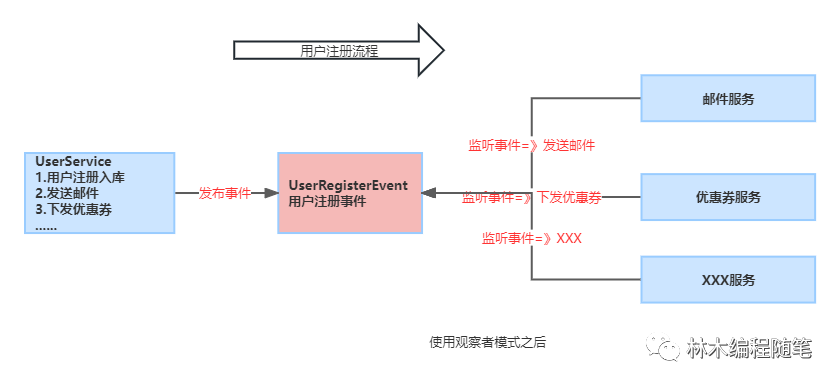
Spring Boot事件机制浅析
1、概述 在设计模式中,观察者模式是一个比较常用的设计模式。维基百科解释如下: 观察者模式是软件设计模式的一种。在此种模式中,一个目标对象管理所有相依于它的观察者对象,并且在它本身的状态改变时主动发出通知。这通常透过呼…
阅读更多...
系统化思考,从初级到高级书单推荐
用思考工具进行系统思考,解决复杂问题,成为某个领域的高手,下面这几本书就是补充你脑海的系统思考的工具,一定要保存。 《简单的逻辑学》 作者:麦克伦尼 一切的系统源自于逻辑,如果你没有逻辑分析的能力&…
阅读更多...
辅助驾驶功能开发-功能对标篇(11)-NOA领航辅助系统-长城
1.横向对标参数 厂商长城车型沙龙/机甲龙魏牌摩卡DHT-PHEV上市时间20222022Q2方案11V5R4L+1DMS12V5R2L+1DMS摄像头前视摄像头2*(8M)3侧视摄像头4*(8M)4后视摄像头1*(8M)1环视摄像头44*(1.3M)DMS摄像头11雷达毫米波雷达554D毫米波雷达//超声波雷达1212激光雷达4*(前3后1,华为ie9…
阅读更多...
安防监控/视频汇聚平台EasyCVR云端录像不展示该是什么原因?该如何解决?
视频云存储/安防监控EasyCVR视频汇聚平台基于云边端智能协同,支持海量视频的轻量化接入与汇聚、转码与处理、全网智能分发、视频集中存储等。音视频流媒体视频平台EasyCVR拓展性强,视频能力丰富,具体可实现视频监控直播、视频轮播、视频录像、…
阅读更多...
@Excel注解
在 Java 开发中,Excel 注解通常用于标记实体类的字段,以指示与 Excel 文件的导入和导出相关的配置信息。 Excel 注解通常是自定义的注解,它可以包含多个属性,用于定义与 Excel 相关的配置,如字段的标题、顺序、数据格…
阅读更多...
最新文章
蓝桥杯刷题 二分-[364]跳石头(C++)
【科研】搜索文献的网站
redis主从复制、哨兵
Android 四大组件启动
LeetCode 1702.修改后的最大二进制字符串:脑筋急转弯(构造,贪心)
35-3 使用dnslog探测fastjson漏洞
GIS自主创新十年路(七):Universal GIS
MySQL实现row_number(一)
甲骨文发布Oracle NoSQL 数据库 -看来NOSQL大行其道了
模板,软件开发中的应用
.NET/Rotor源码研究1补遗 - 解决无法检测操作系统版本的错误
.net中利用oracle产品自带的数据访问组件(Oracle.DataAccess.dll)提升批量更新操作的执行效率